Location: Germany
The Mottorad simulator consists of a 1600cm³ motorcycle fixed to a 6 degrees of freedom motion base with a 4 by 3 meters screen put in front of the user.
The rider’s position is tracked in three dimensions using infrared LEDs and a protector vest as a target to take weight shifting into account for the dynamic model calculations.
“Sound is reproduced by four speakers and a subwoofer, structure born noise by four motorcycle
mounted pressure transducers. Motorcycle’s steering torque feedback is imitated by an electric
direct drive in line with the steering axis.
A multi body real-time motorcycle dynamics model (update-rate f = 1000 Hz) takes the rider’s inputs (ignition button state, steering torque, clutch, gear and throttle signal, front and rear brake pressures, rider’s position) into account to calculate the movements of the virtual motorcycle.”
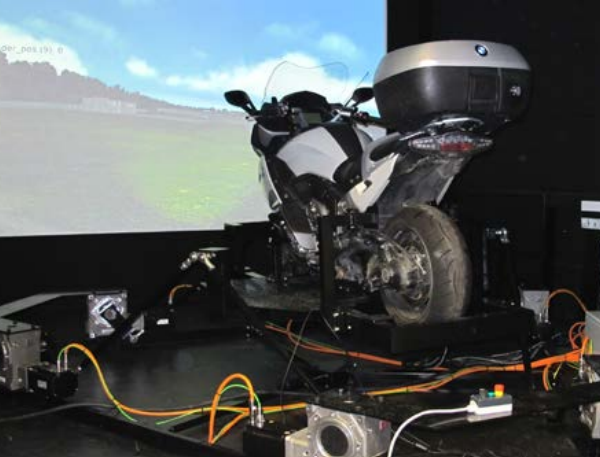
The BMW Motorrad motorcycle riding simulator
Guth S., Geiger M., Will S., Pless R., & Winner H., Motion cueing algoriths to reproduce motorcyce specific lateral dynamics on riding simulators, Proceedings of DSC Europe 2015, Tübingen